Diffussion Model——扩散概率模型
——适用于所有的生成类任务:TTS (☑️)、VC(❓)
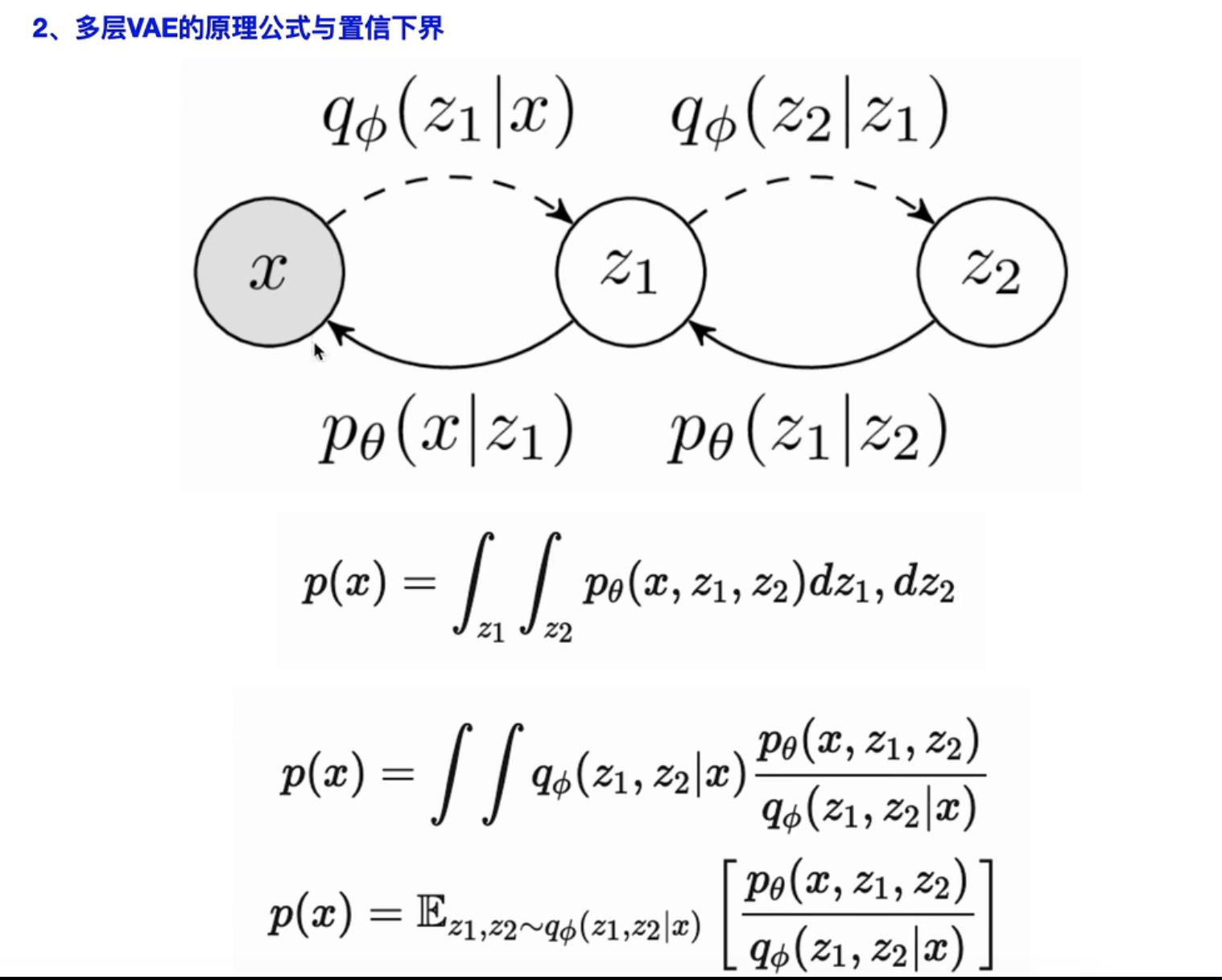
——其实和VAE有点像:多层 VAE
最早见刊时间 1995-2004
论文:2015-ICML && ==2020-NIPS==
- [1] Ho, Jonathan, Ajay Jain, and Pieter Abbeel. “Denoising diffusion probabilistic models.” Advances in Neural Information Processing Systems 33 (2020): 6840-6851.
- [2] Sohl-Dickstein, Jascha, et al. “Deep unsupervised learning using nonequilibrium thermodynamics.” International Conference on Machine Learning. PMLR, 2015.
可参考解读阅读材料:
- 前置的数学知识
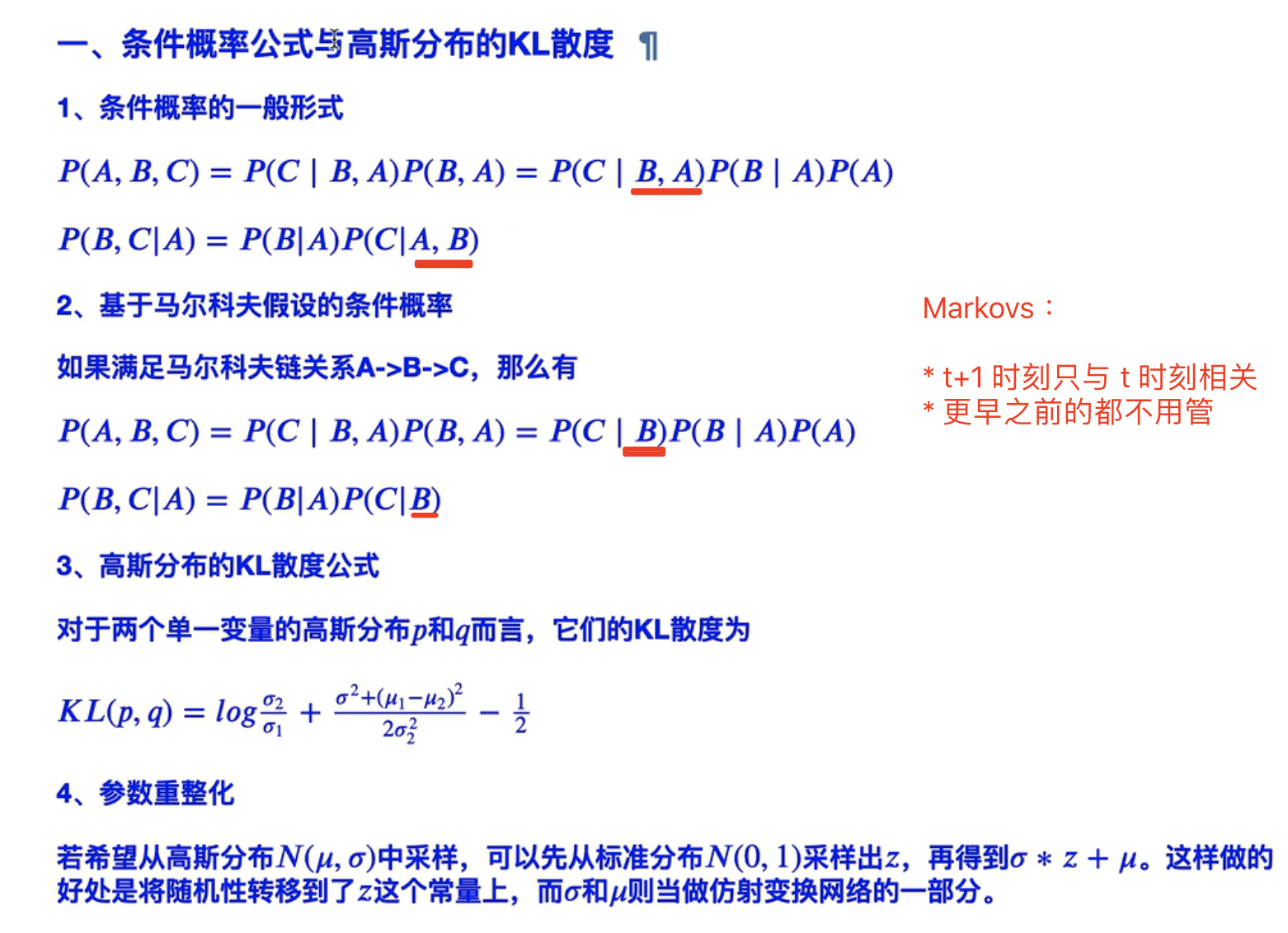
- 贝叶斯公式
- VAE:KL散度
 )
)
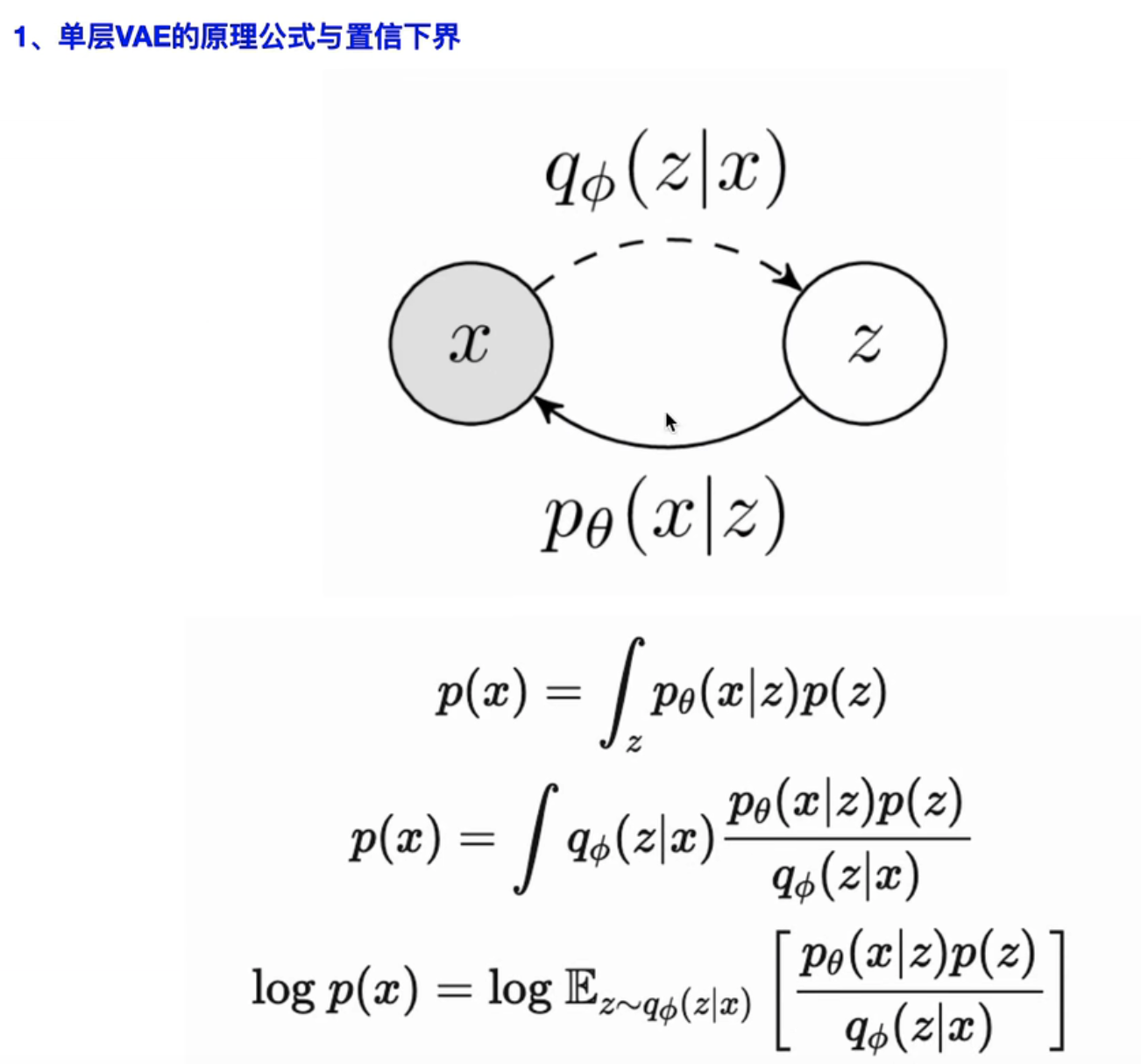
- 训练:x->z
- 推理:z->x
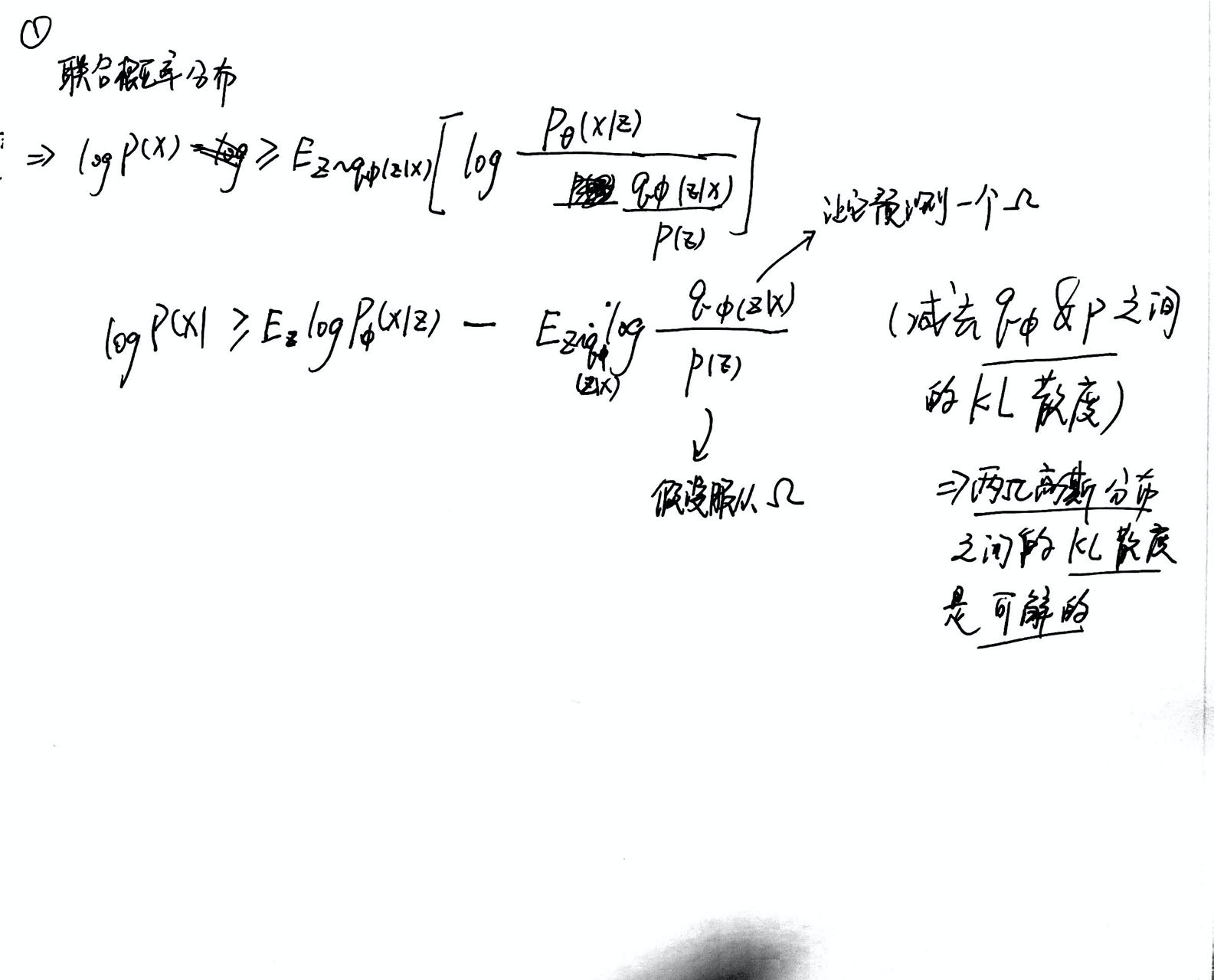
- 【联合概率分布】
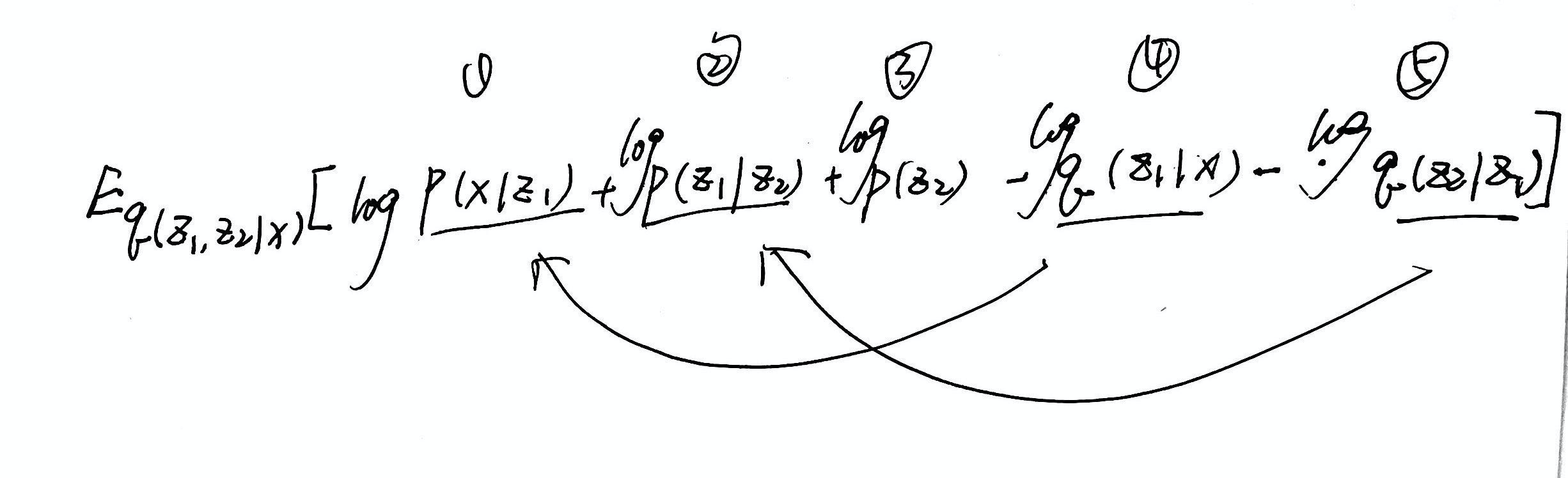
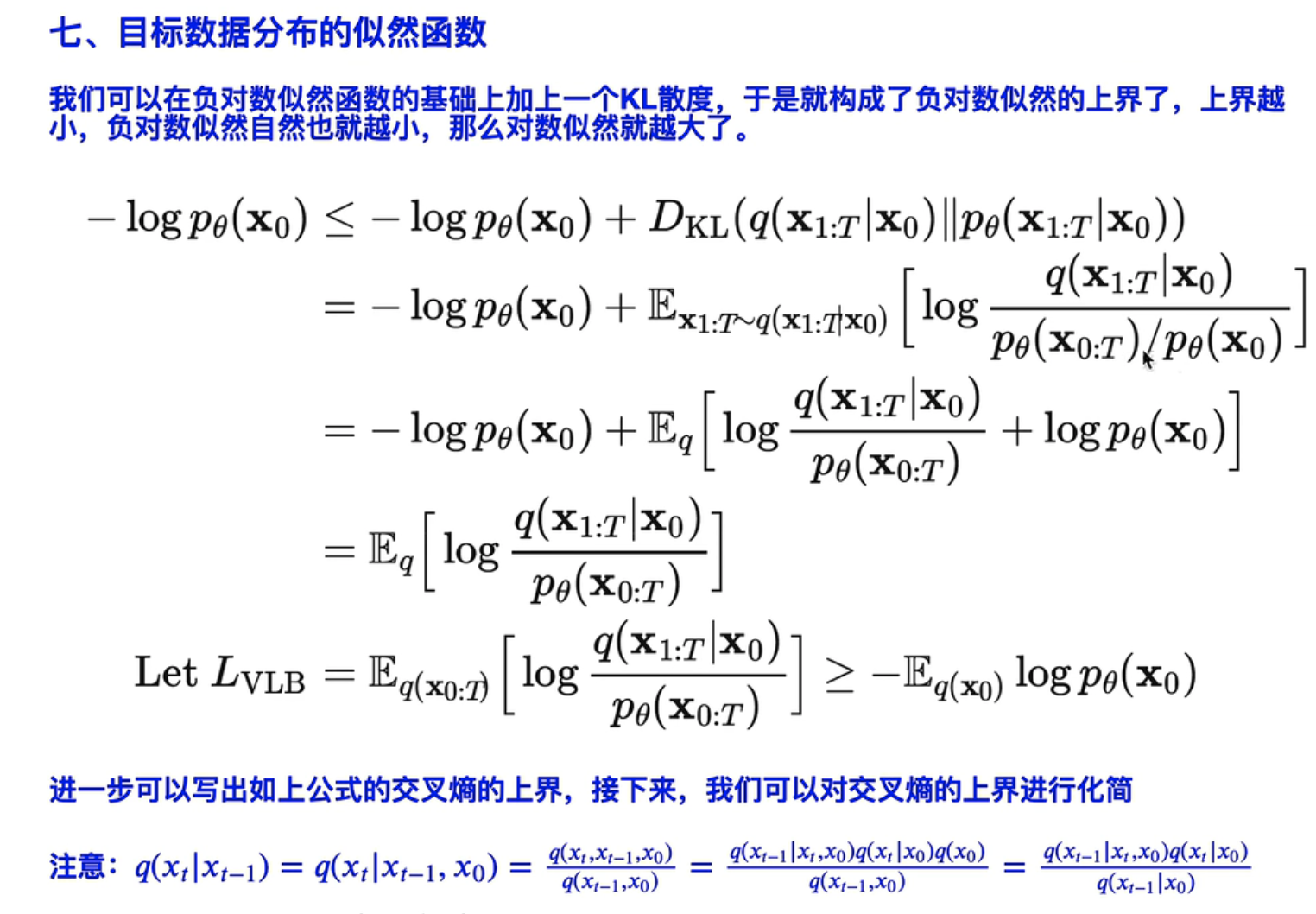
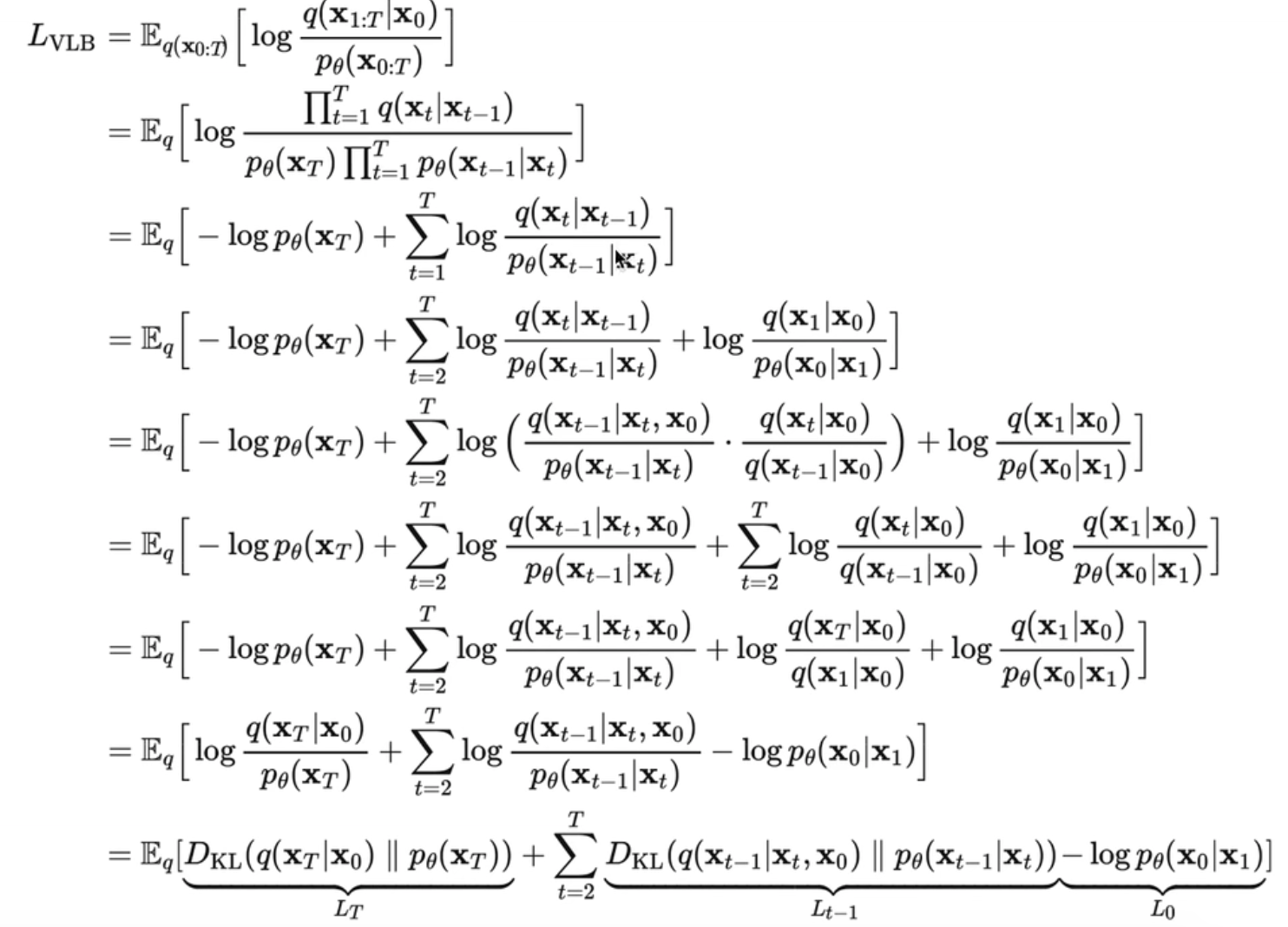
- 训练目标:最大化“对数似然” log p(x)
- 分子分母同时乘上一个“后验分布” q
 )
)
基于的是 Markvo 假设
❤️思考:Diffusion & Multi-VAE 的区别?
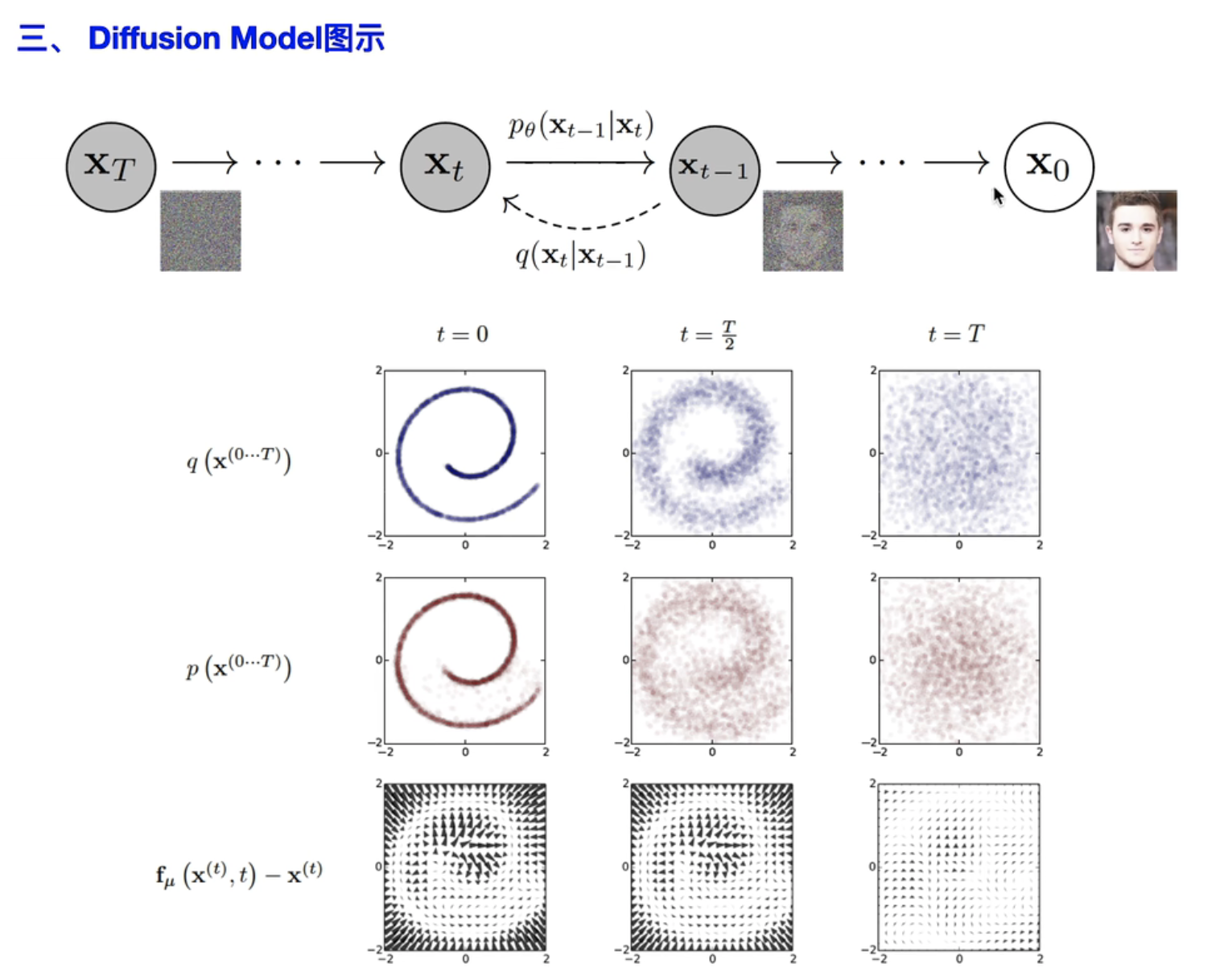
- X0->Xt 扩散过程:熵增
- Xt->X0 逆扩散:去噪,还原
- :对应的“条件概率分布”
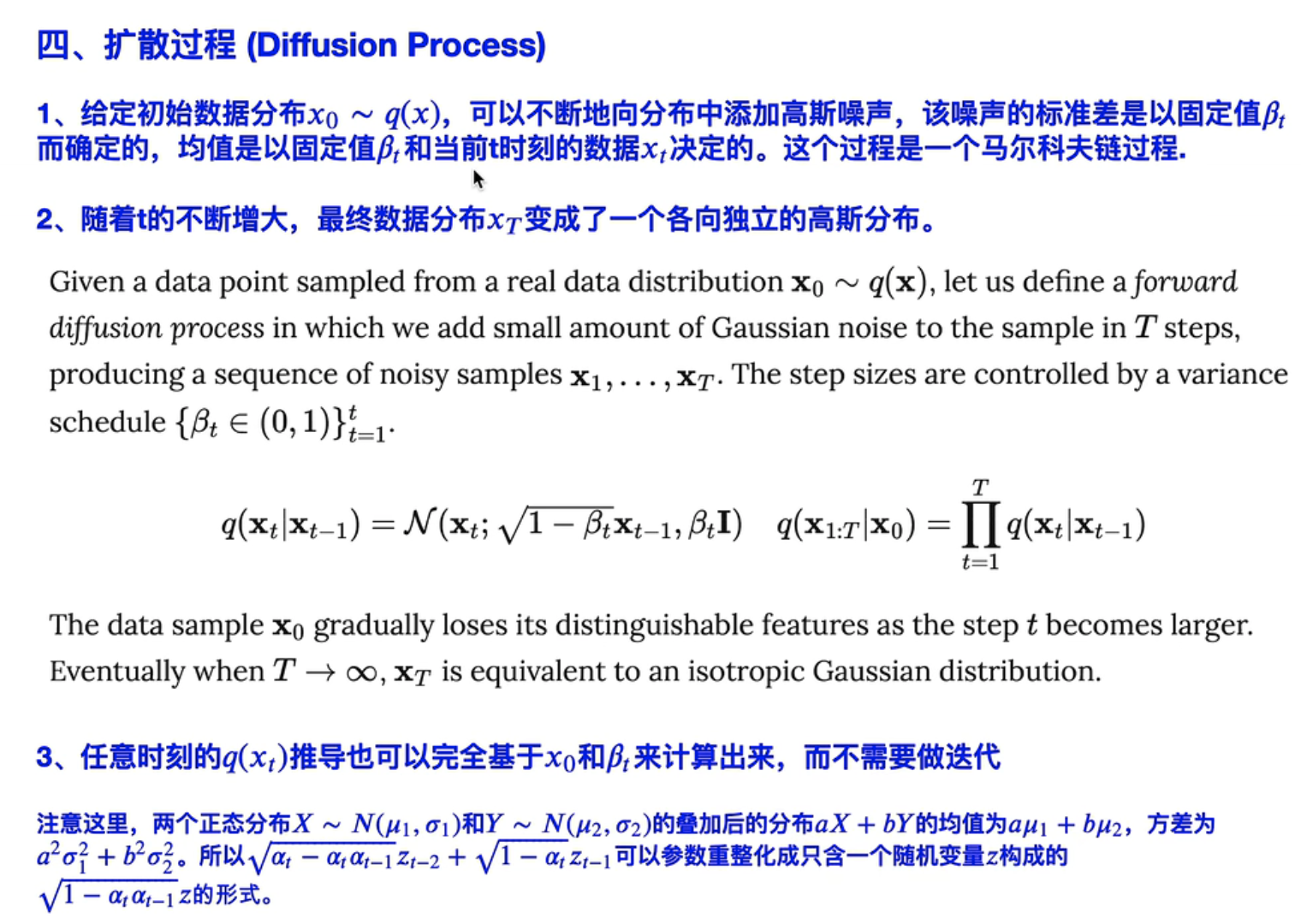
- ==正向过程不含参数,所有 均值、方差 都是确定的==,是一个 markvo链的关系。类比lr,固定不变
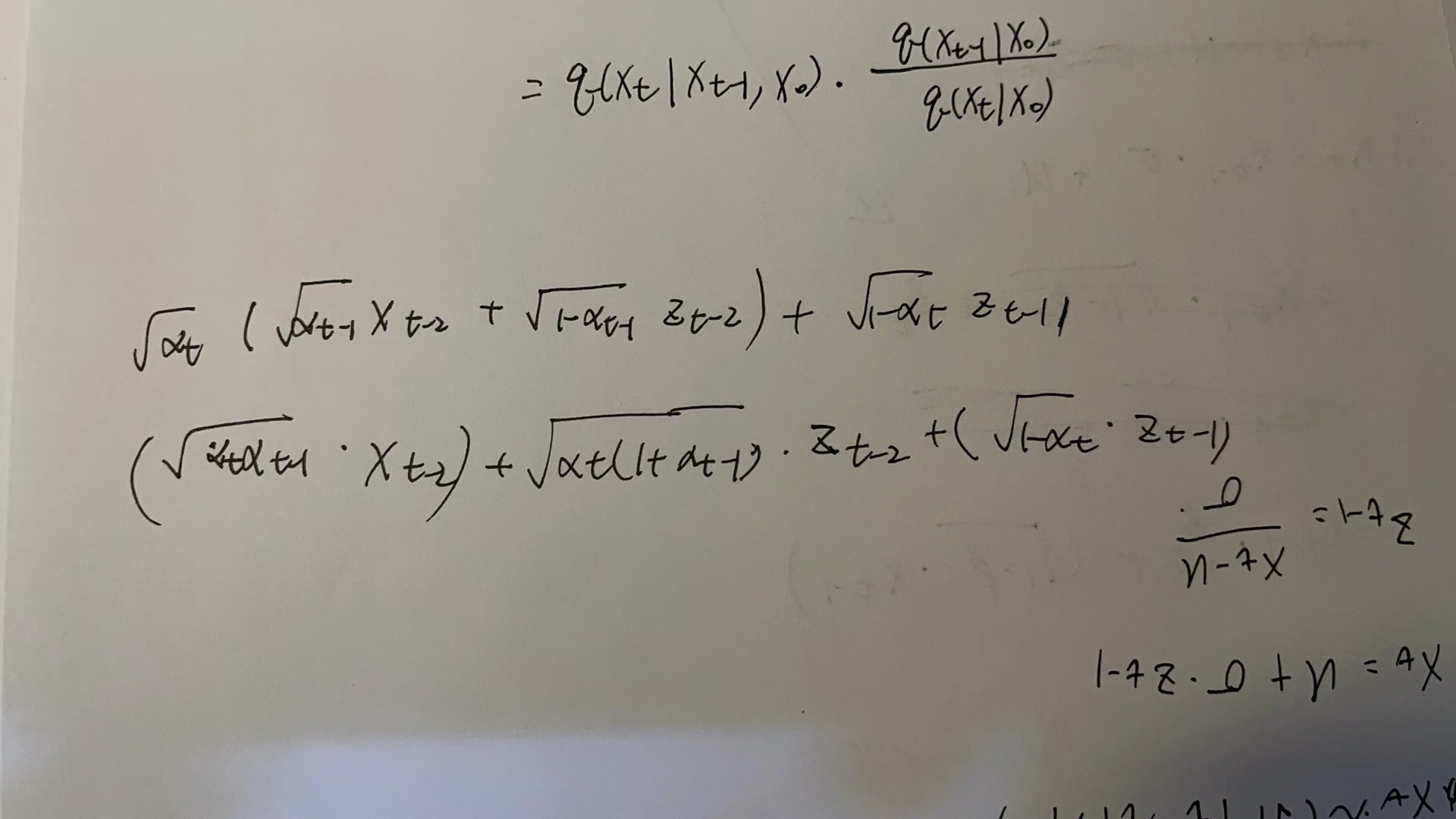
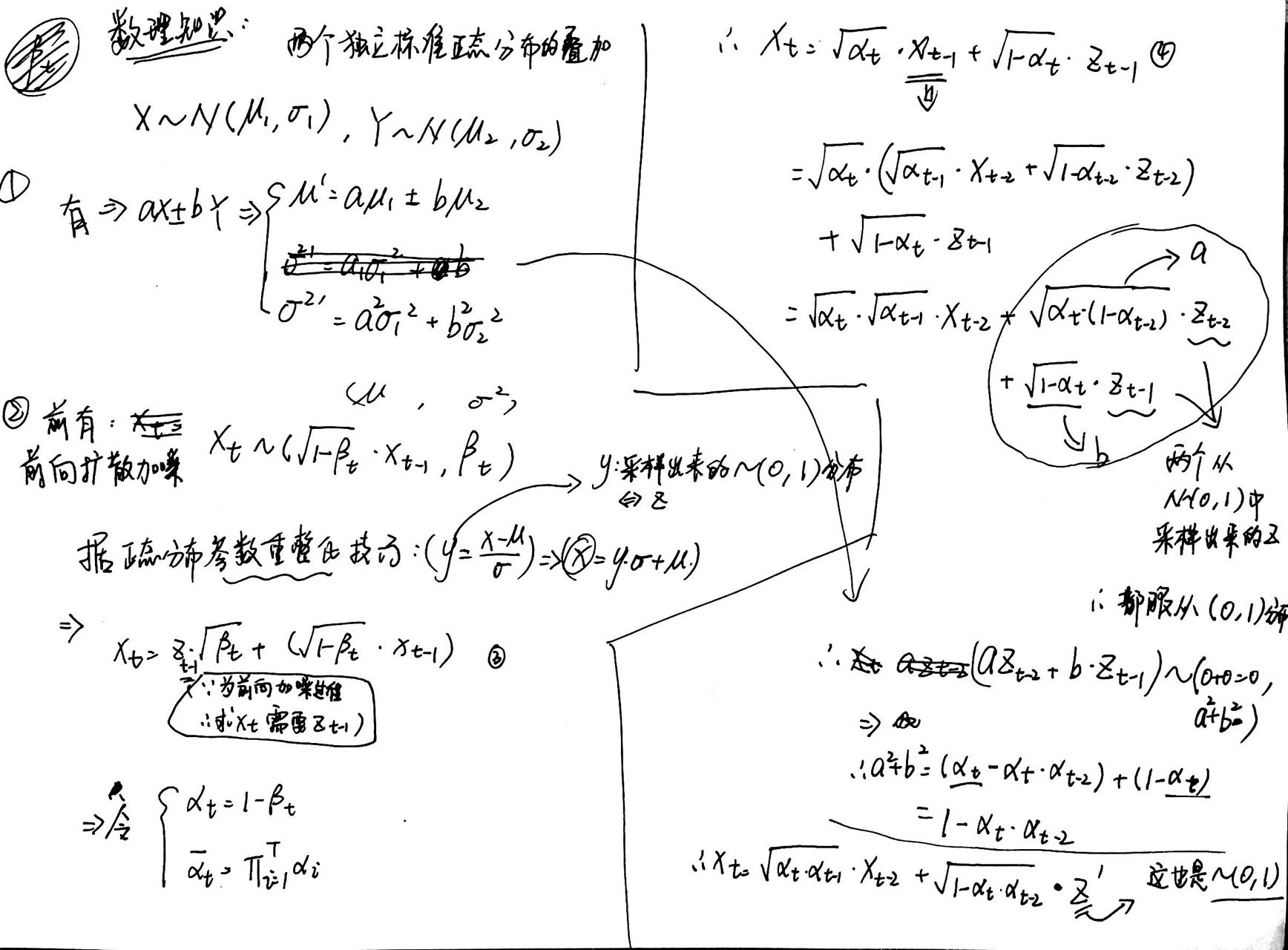
- 正向加噪的过程,是一个条件概率分布,而且是一个 高斯正太分布,均值为: “$
\sqrt{1-\beta_{t}} \mathbf{x}{t-1}
$”,方差为 :“$\beta{t}$” - 各向独立:“各向同性”
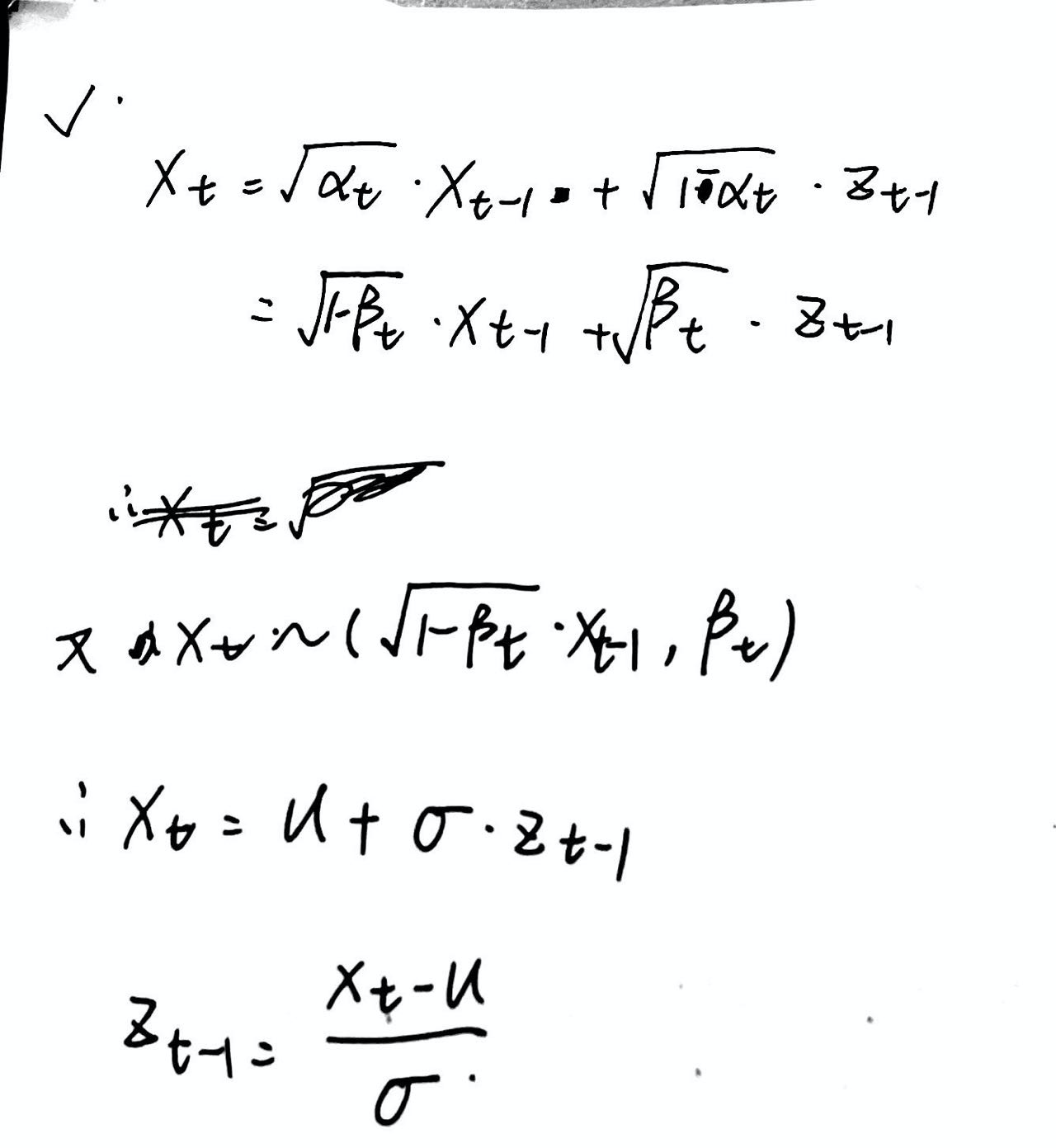
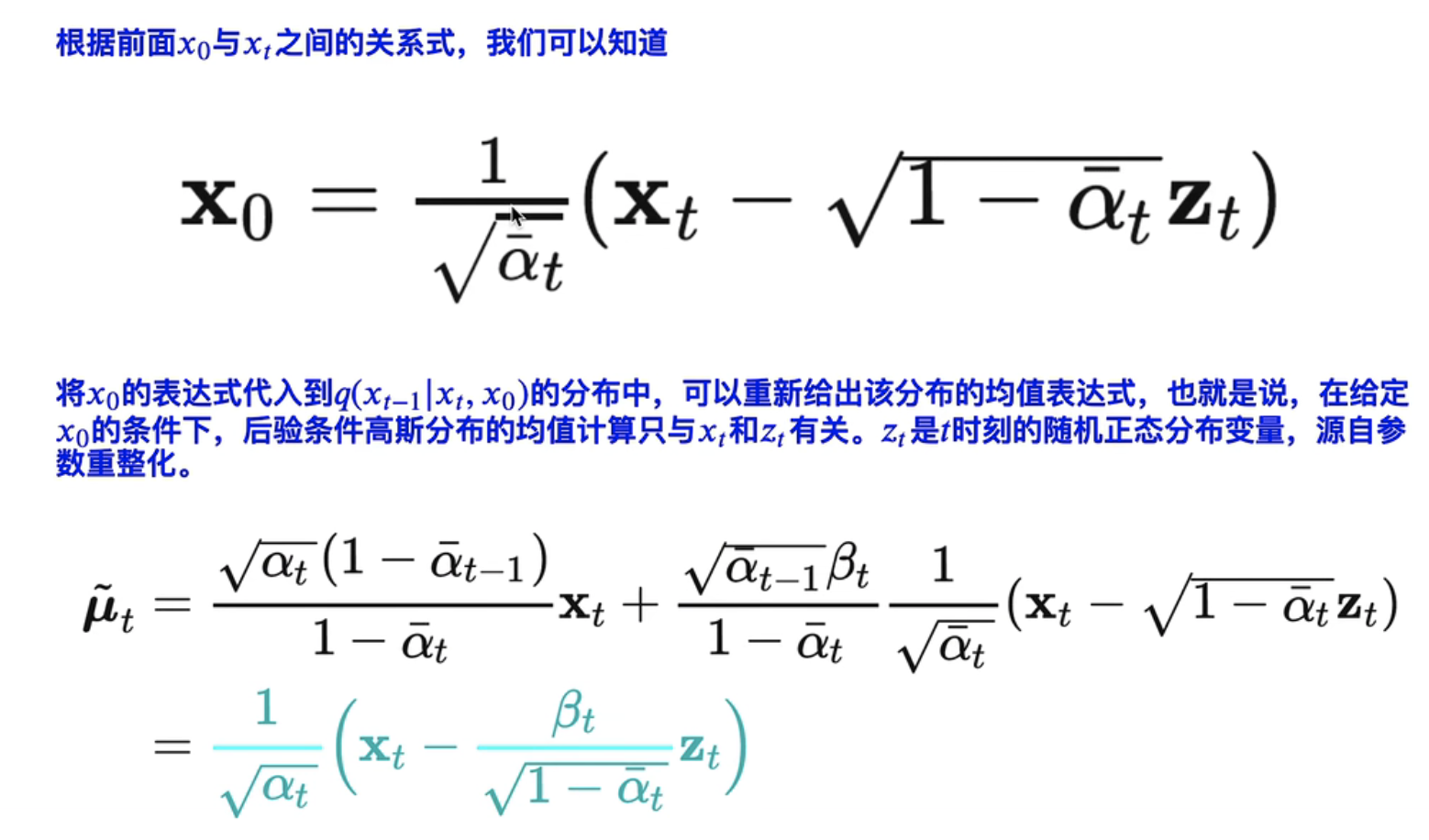
🌟怎么算 X 呢?:
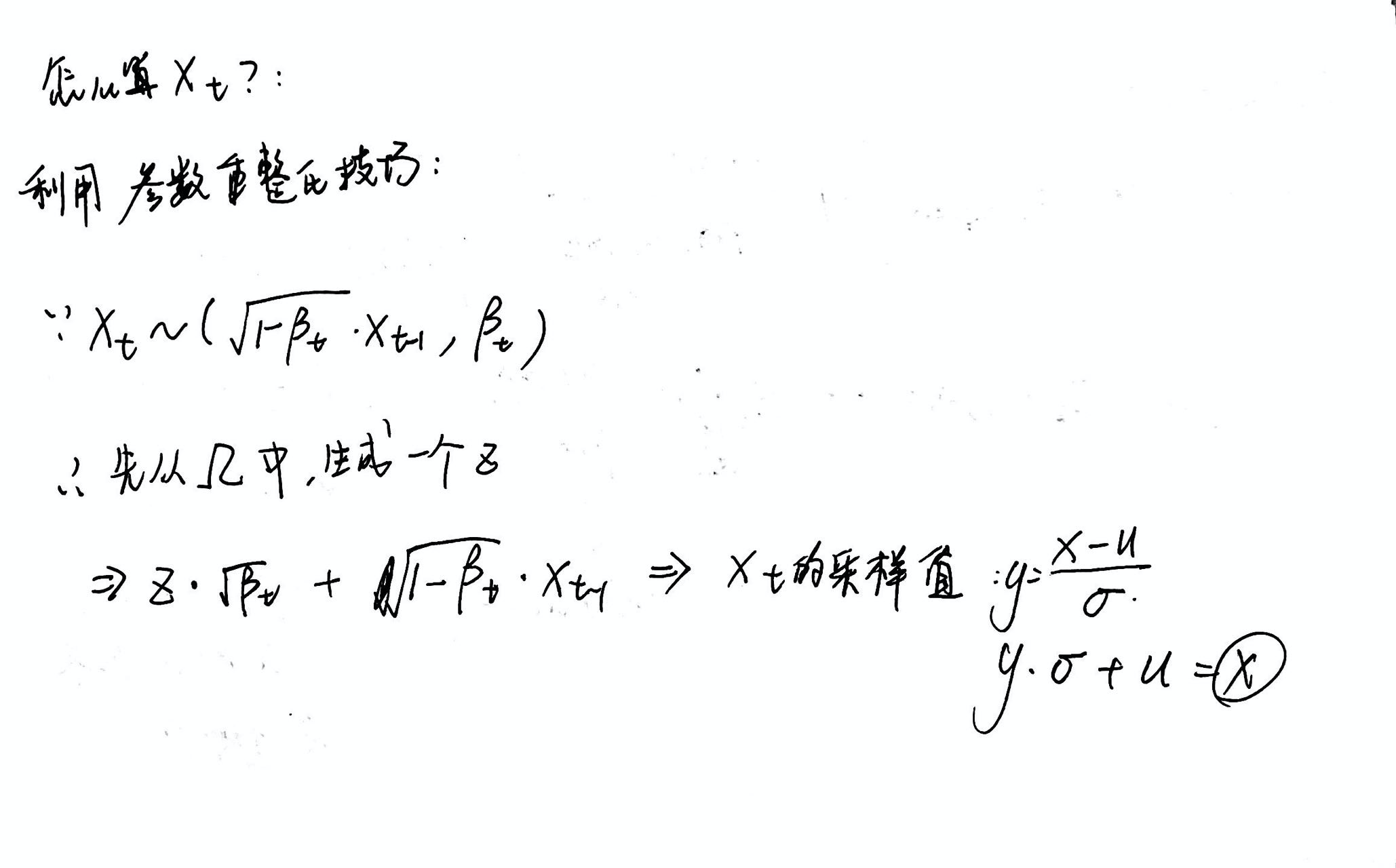
然后可以套 Markvo 迭代,不断得到 Xt+1 … 更多采样值
- 问题:
- T 理论是 ∞ 无穷大,怎么设置?
- 参数化分布的 “$\beta_{t}$” (方差)应该怎么设置?
- $
\left{\beta_{t} \in(0,1)\right}_{t=1}^{t}
$ - 随着时间推移,$\beta_{t}$ 越来越大
关于 T:参数重整化 算出来
所以:

所以,时间取决于:最后的 均值、方差,接近于 “==各向同性==”的正态分布了:即==(0,1)==时,那么就可以说明 Xt “正向扩散过程”已经完全ok了,可以开始“逆扩散过程”了。
这其中,均值方差 alpha、beta (参数化正态分布时设置的)都是我们自己设定的,是个固定值,所以完全可控
总之:==正向扩散,想要得到“标准正态分布”==
一般原则:分布接近噪声时,beta 可以变大,刚开始时,beta 不要太大
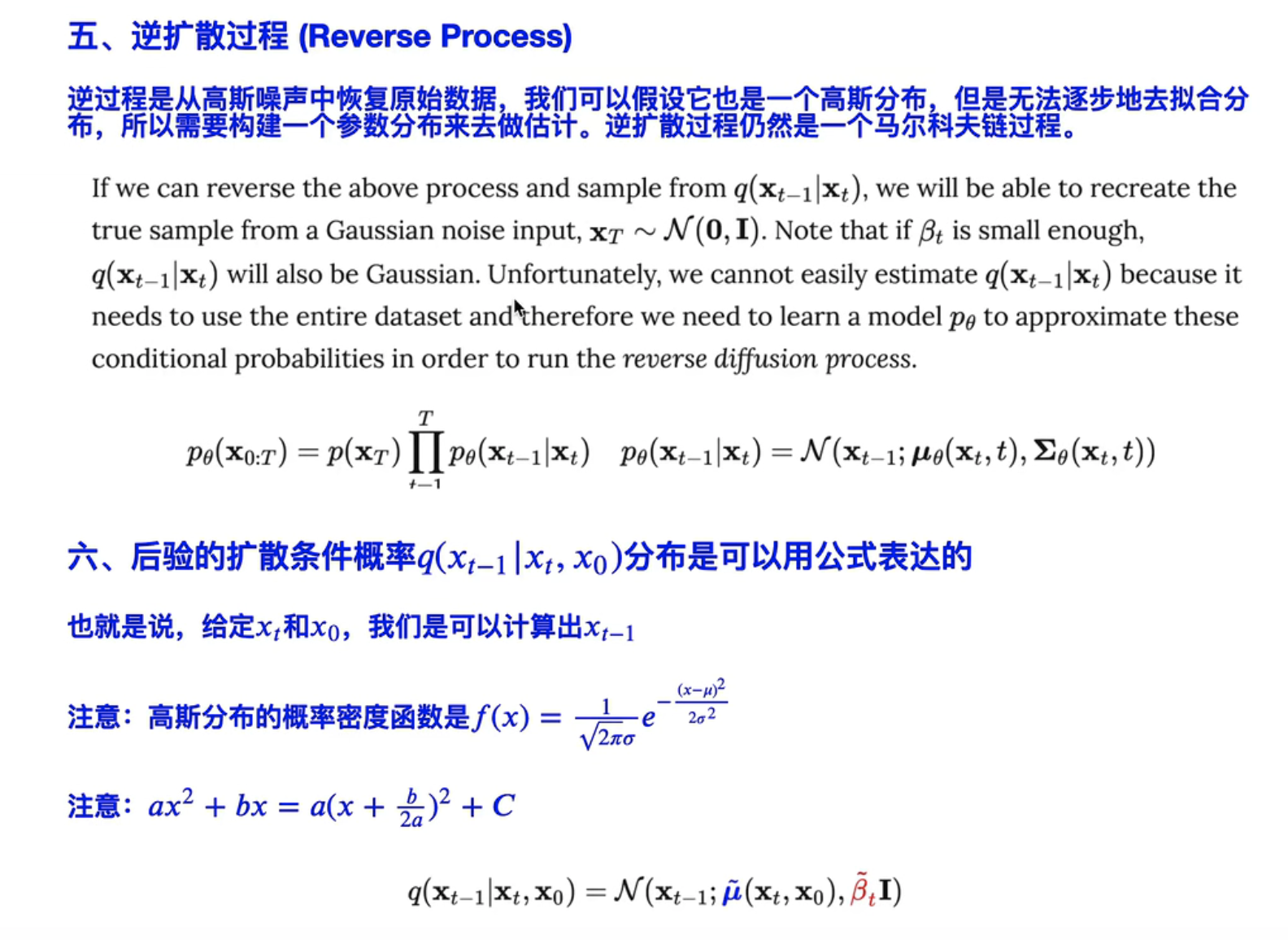
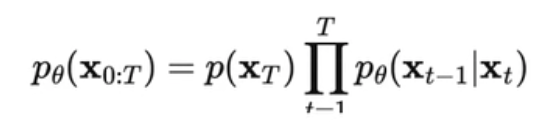
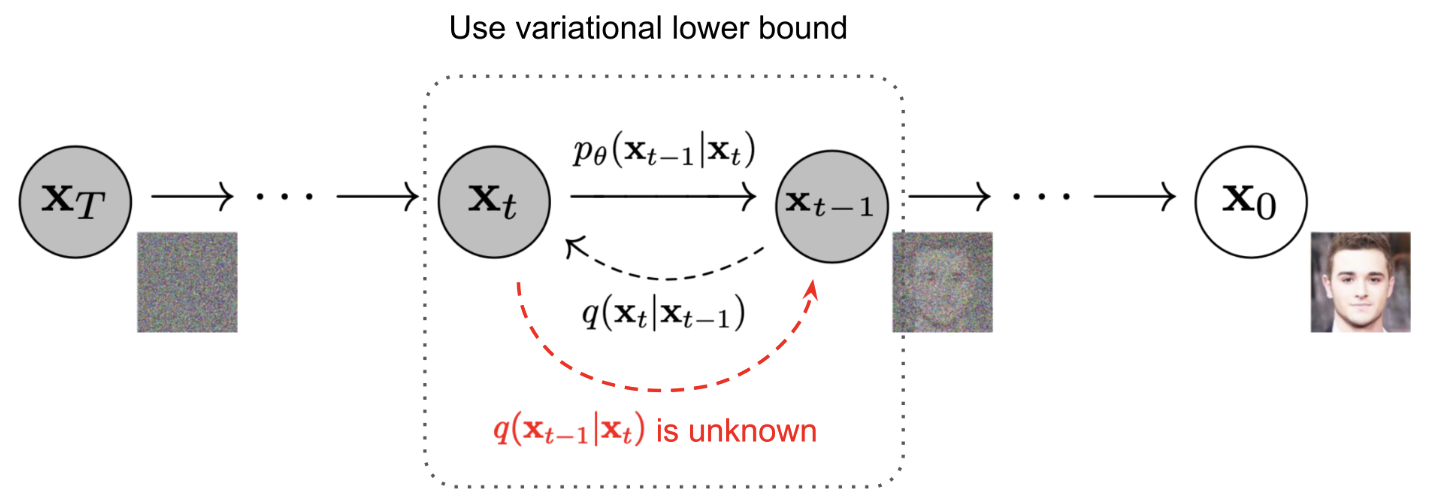
🌟逆扩散过程
 )
)
- 逆扩散,仍然是一个 Markvo chain 过程
- 需要构建一个“==参数分布==”:不然直接从 Xt 到 X0 链式求取非常麻烦,所以需要构建一个网络
- 也是假设为一个 “高斯分布”

- 把问题转化为 (Xt,t)两个变量的关系网络,均值方差都是和(Xt,t)这两个相关
 :
:
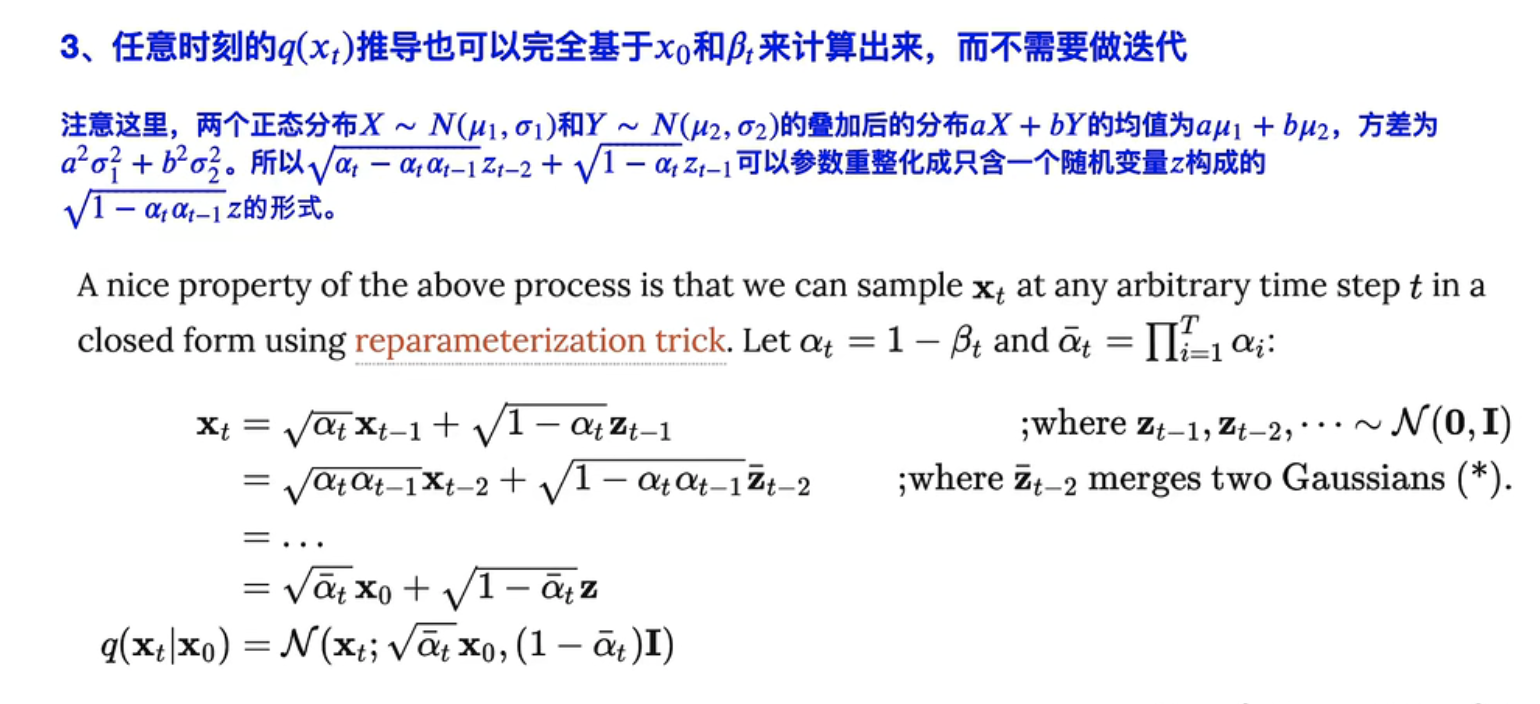
🌟说说怎么算:
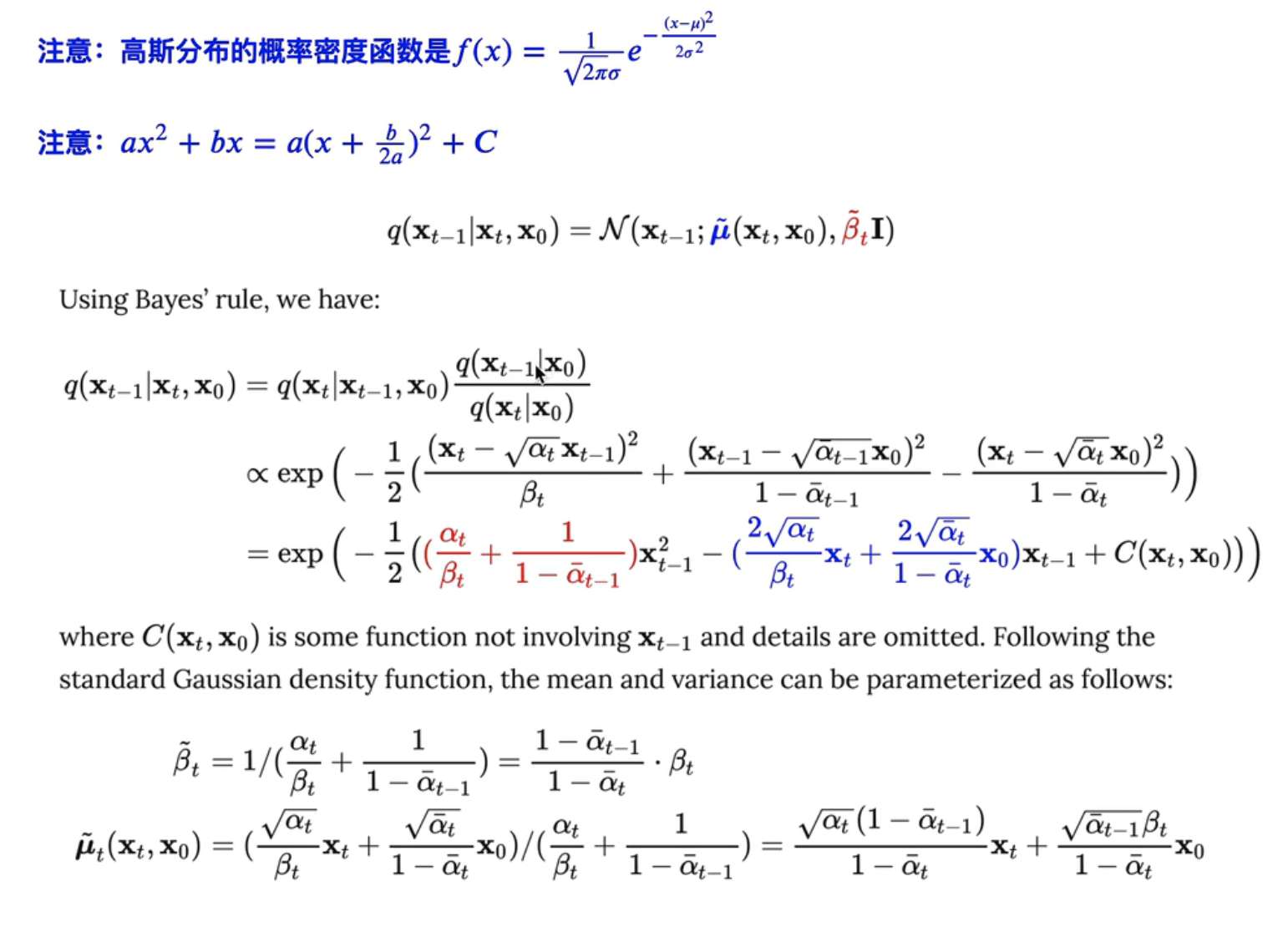
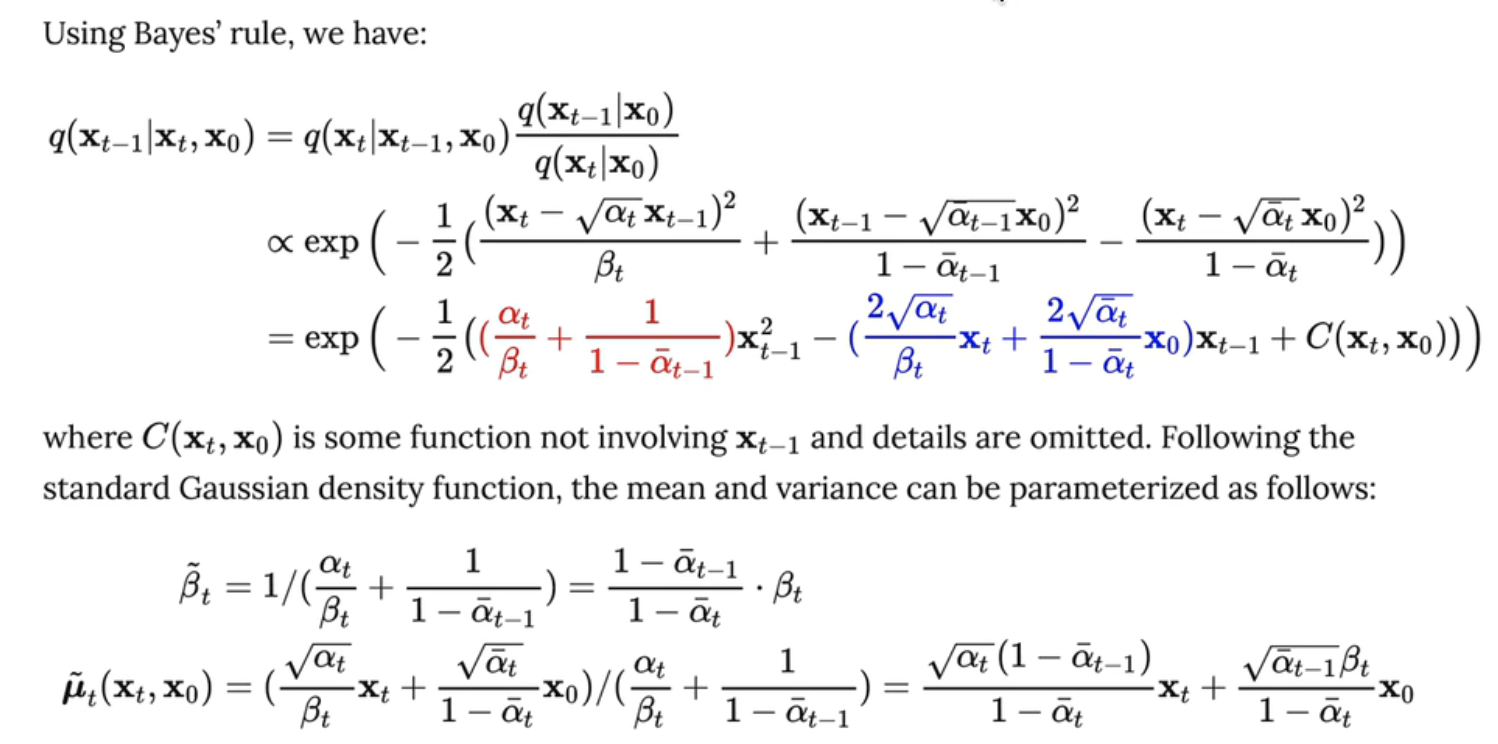
==》基于贝叶斯公式:
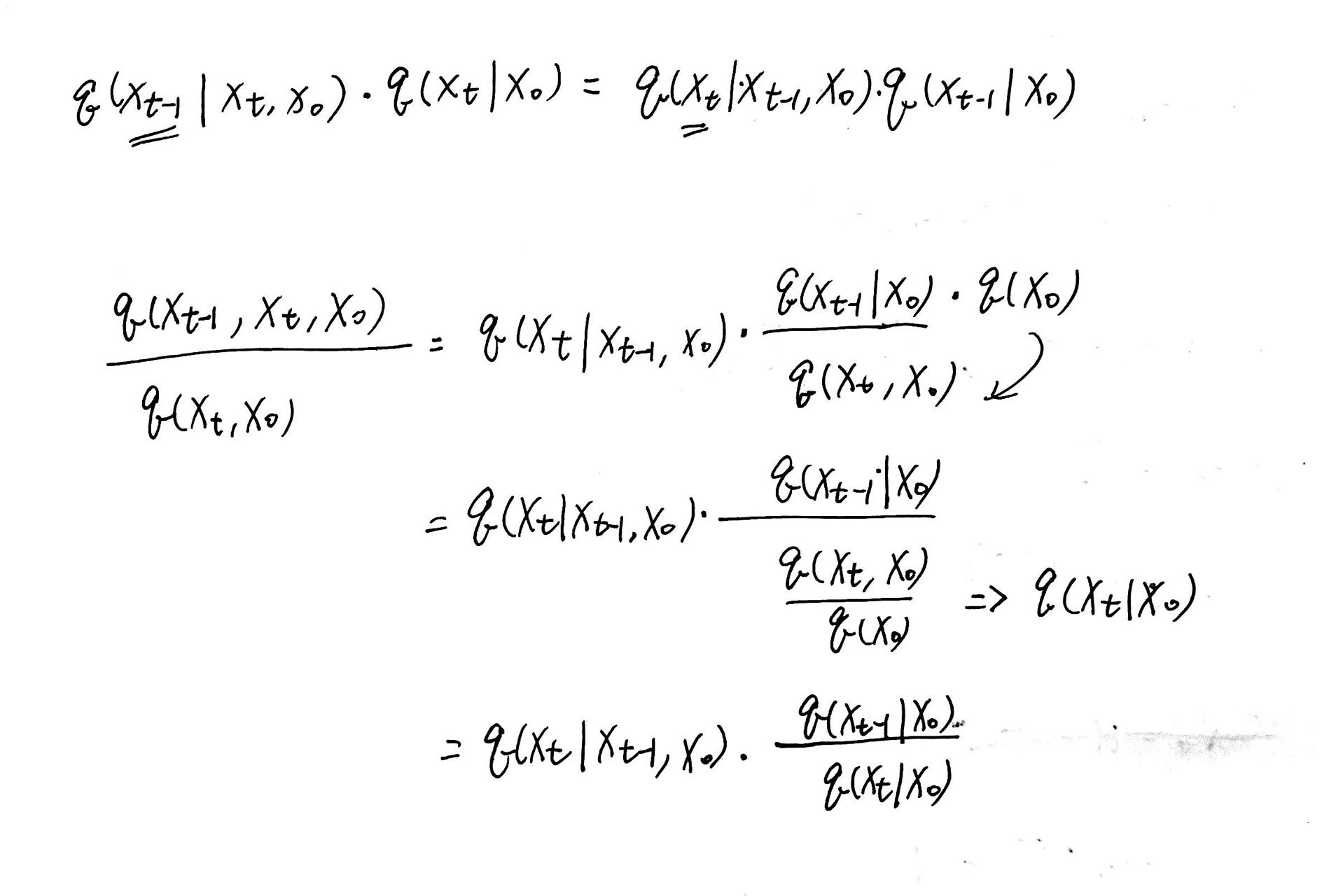
 )
)
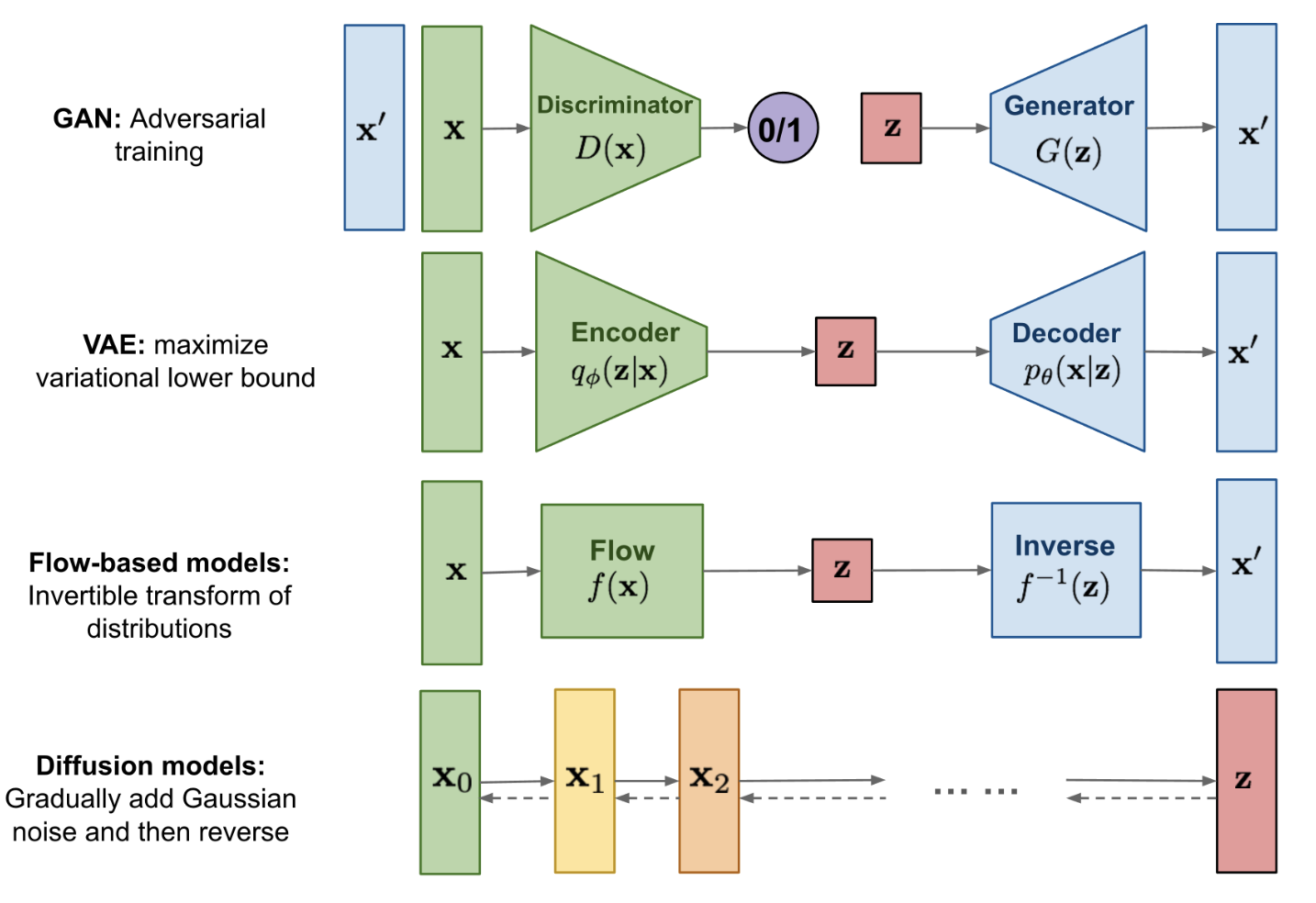
- 图 1. 不同类型的生成模型概述。
发展历史
- 扩散概率模型( Sohl-Dickstein et al., 2015 )
- 噪声条件评分网络( NCSN ; Yang & Ermon, 2019 )
- 去噪扩散概率模型 (DDPM; Ho et al. 2020).
快速总结
- 优点:易处理性和灵活性是生成建模中两个相互冲突的目标。易于处理的模型可以进行分析评估并廉价地拟合数据(例如通过高斯或拉普拉斯),但它们不能轻易地描述丰富数据集中的结构。灵活的模型可以拟合数据中的任意结构,但从这些模型中评估、训练或采样通常很昂贵。扩散模型在分析上易于处理和灵活
- 缺点:扩散模型依赖于长马尔可夫扩散步骤链来生成样本,因此在时间和计算方面可能非常昂贵。已经提出了新的方法来使该过程更快,但采样仍然比 GAN 慢。
谈谈马尔科夫:
- 下一状态的概率分布只能由当前状态决定,在时间序列中它前面的事件均与之无关。这种特定类型的“无记忆性 ”称作马尔可夫性质。
- 转移概率矩阵:
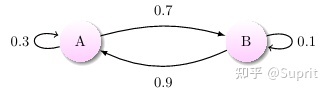
上图中有 A 和 B 两个状态,A 到 A 的概率是 0.3,A 到 B 的概率是 0.7;B 到 B 的概率是 0.1,B 到 A 的概率是 0.9。
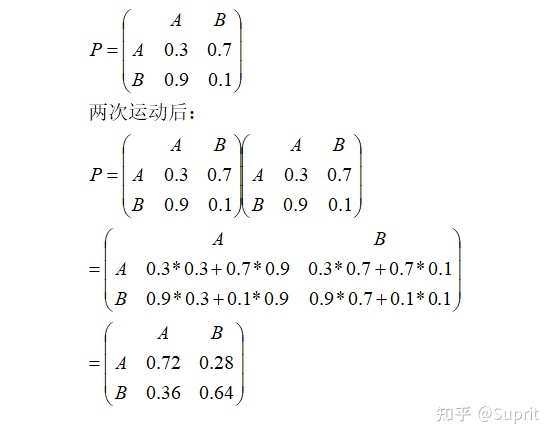
1 | ## 状态转移矩阵 |
1 | Current round: 1 |
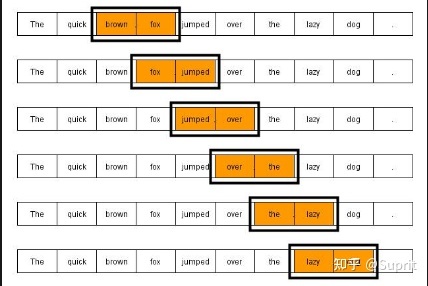
- n-gram 语音识别
语言模型:N-Gram 是一种简单有效的语言模型,基于独立输入假设:第 n 个词的出现只与前面 N-1 个词相关,而与其它任何词都不相关 。整句出现的概率就是各个词出现概率的乘积。这些概率可以通过直接从语料中统计 N 个词同时出现的次数得到。
声学模型:利用 HMM 建模(隐马尔可夫模型),HMM 是指这一马尔可夫模型的内部状态外界不可见,外界只能看到各个时刻的输出值。对语音识别系统,输出值通常就是从各个帧计算而得的声学特征。
Diffusion
- 前向扩散(逐渐加噪声)
- 后向扩散(学会从带噪声数据中恢复内容信息)
- 高斯噪声:符合正态分布的噪声
- 起伏噪声、宇宙噪声、热噪声和散粒噪声等等
- N(μ,σ^2)
- 高斯分布函数
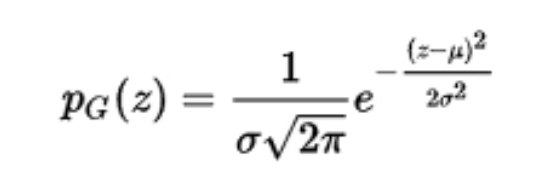
高斯分布
高斯分布可以写成以下形式:
![[公式]](https://www.zhihu.com/equation?tex=%5Cmathcal+N%28x%7C%5Cmu%2C%5Csigma%5E2%29%3D%5Cfrac%7B1%7D%7B%5Csqrt%7B2%5Cpi%7D%5Csigma%7Dexp%5Cleft%28+-%5Cfrac%7B%28x-%5Cmu%29%5E2%7D%7B2%5Csigma%5E2%7D+%5Cright%29)是均只期望,
是方差,以上形式是基于只有一个变化维度的连续随机变量,因此以上又称为一元高斯分布。
当 时,称为标准高斯分布(标准正态分布):
当我们要对概率密度函数求值时,我们需要对σ平方并且取倒数。当我们需要经常对不同参数下的概率密度函数求值时,一种更高效的==参数化分布==的方式是==使用参数β∈(0,∞)==,来控制分布的精度(precision)(或方差的倒数):
$$\frac{1}{\sigma}=\sqrt{\beta} $$

正态分布可以推广到Rn空间,这种情况下被称为多维正态分布(multivariate normal distribution)。它的参数是一个正定对称矩阵∑:

参数μ仍然表示分布的均值,只不过现在是向量值。参数∑给出了分布的 ==协方差矩阵== 。和单变量的情况类似,当我们希望对很多不同参数下的概率密度函数多次求值时,协方差矩阵并不是一个很高效的参数化分布的方式,因为对概率密度函数求值时需要对∑求逆。我们可以使用一个精度矩阵(precision matrix)β进行替代:

我们常常把协方差矩阵固定成一个对角阵。一个更简单的版本是==各向同性(isotropic)高斯分布==,它的协方差矩阵是一个标量乘以单位阵。